Thesis Work:
Geometric Mechanics of Locomotion

Thesis Work:
Geometric Mechanics of Locomotion
Locomotion is the means by which systems use internal shape changes to move through the world, and is one of the most fundamental actions performed by robots and living organisms.
Geometric mechanics is the application of differential geometry to problems in classical mechanics. By studying locomotion with geometric tools, we can make rigorous statements about systems’ motion capabilities.
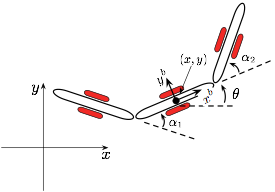
The three-link kinematic snake shown above propels itself by using shape changes (changes to the internal joint angles) to push against the passive wheels on the links. These wheels act as nonholonomic constraints that prevent lateral translation while allowing free longitudinal and rotational motion of each link. Using the framework of geometric mechanics, this locomotory effect can be quantified and qualified, leading to the identification of patterns of motion that produce a desired net displacement.
My thesis research focuses on two aspects of geometric mechanics in locomotion: improving approachability of the material to non-specialists and optimally choosing the coordinates used in these analyses.
Approachability
Geometric locomotion studies have produced powerful tools for system analysis. Unfortunately, the inherent basis of these studies in differential geometry often acts as a barrier to entry for non-specialists who otherwise might benefit from applying the resulting tools to a broader set of systems. In many cases, however, the largest barrier is one of language rather than concept, in that the differential geometric terms in which the results are presented have dual concepts in vector calculus.
In my thesis work I emphasize these more familiar vector-calculus terms wherever possible, noting the more formal nomenclature but keeping it out of the main development if a simpler description will suffice. Some of these simplified developments also lead to novel graphical representations of system kinematics. For instance, a one-form is a structure commonly encountered in differential geometry, defined as a “linear map from vectors to scalars.” This structure is functionally equivalent to the more familiar concept of a vector field with a dot product, and thinking in such vector terms provides an avenue for a newcomer to the field to draw on prior knowledge and intuition. Making this vector analogy led us to develop the connection vector field as an illustration of the local connection, a set of one-forms used in geometric mechanics to describe the relationship between shape velocities and the position velocities they induce.

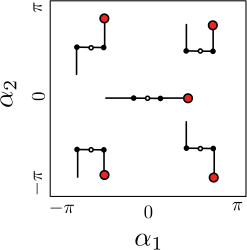
The connection vector fields for the three-link system at the top of this page are shown above. Each of the longitudinal, lateral, and rotational components of the position velocity has a corresponding vector field defined over the shape space (the space of joint angles), and the velocity produced by a given input shape velocity is found by taking its dot product with each field. Here, the vector a is aligned with the longitudinal field and orthogonal to the rotational field, so it produces a pure positive longitudinal translation. In contrast, the vector b is orthogonal to the longitudinal field and anti-aligned with the rotational field, so it produces a pure negative rotation with no translation. The field for lateral motion has zero magnitude because the lateral direction of the body frame is always aligned with the constraint on the middle link.
Optimal Coordinates
As in many other areas of math and engineering, differential geometry makes heavy use of coordinate invariance – the idea that structures exist independently of the coordinates used to describe them and are unaltered by a change of coordinates. What is less well recognized, however, is that coordinate invariance is in many cases an inherently local property, and that the choice of coordinates can play an important role in analysis of systems’ macroscopic behavior. A primary result in my thesis is finding optimal coordinates for locomotion study.
Locomotion is often accomplished by gaits, cyclic shape changes with characteristic net displacements. Lie bracket averaging is a powerful technique for finding gaits that produce desired net displacements without simulating each one individually. In vector calculus terms, the Lie bracket is a set of functions over the shape space that are related to the curls of the connection vector fields. The average position velocity of the system produced by a differential oscillation (small-amplitude gaits) in the shape corresponds to the magnitudes of these functions at the center of the oscillation – each function corresponding to one direction in the body frame.
For larger, non-differential gaits, which are closed curves in the shape space, the average velocity (or net displacement over each cycle) can be approximated by integrating the Lie bracket over the area of the shape space enclosed by the gait. This principle is closely related to Stokes’s theorem, which equates the line integral of a vector field along a closed curve to the area integral of the curl of the vector field over the area bounded by the curve. The quality of this approximation is inversely proportional to the amount the system rotates during the gait, which until recently was regarded as a property of the system and the gait.
In my research, I have found that the choice of body frame also affects the amount of intermediate rotation and that this choice can be systematically optimized to minimize the rotation. For instance, consider two choices of body frame, one taken from the middle link of the system and one based on its medial line (and center of mass):

In each figure, the three-link system is shown with θ = 0 for different shapes. At a basic level, the medial-line coordinates on the right provide a more intuitive representation of the system’s position, with the head-to-tail relationship much more consistent across the shapes than it is with the middle-link coordinates on the left.
The medial line also rotates much less than the middle link in response to shape changes. Qualitatively, the middle link generally counter-rotates with respect to the outer links when the joints are moved; the medial line counter-rotates to the middle link, and so ends up rotating very little as the system changes shape. Consequently, the Lie bracket approximation techniques work significantly better when used with the medial line coordinates rather than the link-based coordinates.
Medial lines for a three-link system are weighted averages of the orientations of the three links. To find the best set of weights, or to choose coordinates for other systems, I have developed a quantitative means of optimizing the coordinates. This approach is based on the Hodge-Helmholtz decomposition of a vector field (or one-form) into a divergence-free field that is the vector field with smallest mean squared magnitude that has the same curl as the original field and a curl-free field that is the conservative (gradient) field that best approximates the original field.
When this decomposition is applied to the connection vector field for rotation in arbitrarily chosen coordinates, the divergence-free component is the smallest-possible rotation connection vector field for the system (producing the least-possible rotations), and the curl-free component is the gradient of the coordinate change with respect to the system’s shape:

Further Reading
1)R. L. Hatton and H. Choset. Optimizing Coordinate Choice for Locomoting Systems. In the Proceedings of the IEEE International Conference on Robotics and Automation, May 2010. PDF
2)R. L. Hatton and H. Choset. Approximating Displacement with the Body Velocity Integral. In the Proceedings of Robotics: Science and Systems, Seattle, USA, June 2009. PDF
3)R. L. Hatton and H. Choset. Connection Vector Fields for Underactuated Systems. In the Proceedings of the IEEE BioRobotics Conference, October 2008. PDF